

Luca Massari
Post Doc at l’Istituto di BioRobotica, Scuola Superiore Sant’Anna (Pisa).
Post Doc at l’Istituto di BioRobotica, Scuola Superiore Sant’Anna (Pisa).
Read bio
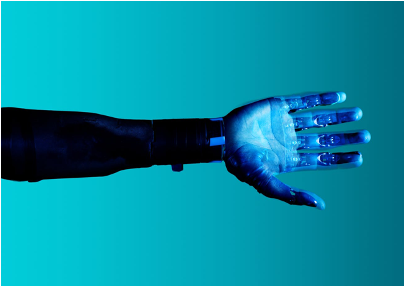
Tactile sensor emulates the human sense of touch in sensing and locating a pressure over a large surface, reproducing human mechanoreceptors activity. The current patent includes the sensor manufacturing process, a robotic arm coated by this sensor, and a method for its operation.
Innovative for its lightness and adaptability to large curved surfaces, it can cover robotic prostheses and / or collaborative robotic arms, as an artificial skin.

Patent Status
PENDING
Priority Number
102019000003657

Priority Date
13/03/2019
License
INTERNATIONAL



Problem
The enabling technologies to make a robot qualitative leap to collaborative robotics are very important.Having a robot that is not collaborative enough to work closely with humans in complete safety is the real problem.key technology hardware to make a collaborative robot are enclosed in sensors that provide the machine with as much information as possible.There are many emerging technologies in this regard, as well as many strands of thought for the implementation of such sensors. The problems remain those of the more generic sensors as well as the management of them: reliability, compactness, resolution, drifting, etc. … to get to the cost-effectiveness of purchase, management and maintenance.

Current Technology Limits
Modern robots show increased mobility and flexibility compared to traditional robots; additionally they are equipped with sensors. However, the tactile sensors available are unable to cover large curved surfaces, and do not provide adequate sensitivity. The present device overcomes these limitations: it can cover any type of surface (even large curved surfaces), and it detects contact point and pressure when a force is applied.
Killer Application
The tactile sensor enables the robotic prosthetic coating and mechanical limbs coating for collaborative robots. The system is flexible thanks to the use of a neural network methodology, overcoming the limitations of wiring.


Our Technology and Solutions
The tactile sensor is composed of a silicone rubber casing containing an optical fiber that connects, in a continuous path, a plurality of Fiber Bragg Grating (FBG) sensors.
The casing, less than 10 mm thick, deforms under the action of a force applied to its surface, transmitting a corresponding stress to the FBG sensors which is translated into an optical signal, transported by the optical fiber. Compared to the tactile sensors developed so far, this receptor mimics the human sense of touch in terms of flexibility, deformation and sensitivity in perceiving and locating pressure over a large area, even curved, up to 90 cm2. The biorobotic device can be used to coat robotic prostheses, including industrial or assistive collaborative robots, and connected to neuronal networks. The use of FBG sensors guarantees an easy manufacturing process with a repeatable result.
Advantages
The tactile sensor is light and flexible, adaptable to any type of surface covering large curved areas. The main advantage is represented by the perceptive sensitivity – ability to determine pressure and point of contact for an applied force.
The use of FBG sensors simplifies the manufacturing process, and increases repeatability.

Roadmap
The invention has been implemented on a robotic arm, fully designed by the research group, but it can be easily integrated on industrial robots with the aim to add sensorial capability.
TRL
Team






