

Luca Massari
Post Doc presso l’Istituto di BioRobotica, Scuola Superiore Sant’Anna (Pisa).
Post Doc presso l’Istituto di BioRobotica, Scuola Superiore Sant’Anna (Pisa).
Leggi bio
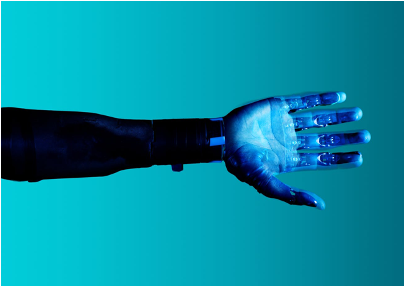
Il sensore tattile per braccio robotico emula il senso umano del tatto nel percepire e localizzare la pressione su un’ampia superficie, riproducendo l’attività dei meccanorecettori umani. È incluso un processo per la fabbricazione del sensore, un braccio robotico rivestito dal sensore, e un metodo per il funzionamento del sensore. Innovativo per leggerezza e adattabilità ad aree curve, può rivestire ampie superfici di protesi robotiche e/o di bracci robotici collaborativi, andando a rappresentare una superficie cutanea artificiale.

Stato del brevetto
DEPOSITATO
Numero di priorità
102019000003657

Data di priorità
13/03/2019
Licenza
INTERNAZIONALE



Problema
In robotica sono di fondamentale importanza le tecnologie abilitanti per fare il salto di qualità di un robot alla robotica collaborativa.
Il problema si può riassumere proprio in questo: avere un robot non abbastanza collaborativo per lavorare a stretto contatto con l’essere umano in completa sicurezza. Le key tecnologies hardware per rendere un robot collaborativo sono racchiuse nei sensori che forniscono alla macchina quante più informazioni possibili. Ci sono molte tecnologie emergenti al riguardo, così come molti filoni di pensiero per l’implementazione di tali sensori, ma i problemi rimangono quelli dei più generici sensori oltre che la gestione di essi: affidabilità, compattezza, risoluzione, drifting, ect… per arrivare all’ economicità di acquisto, di gestione e manutenzione.

Limiti attuali tecnologie / Soluzioni
I robot di nuova concezione hanno maggiore mobilità e flessibilità rispetto ai robot tradizionali e sono dotati anche di capacità sensoriali. Tuttavia, i sensori tattili forniti non possiedono adeguata sensibilità e non sono in grado di coprire ampie superfici curve. Il presente dispositivo rappresenta una soluzione per entrambe le limitazioni menzionate, poiché risulta adattabile a coprire qualunque tipo di superficie (comprese ampie superfici curve), ed in grado di rilevare la pressione e il punto di contatto delle forze applicate.
Killer Application
Il sensore tattile permette il rivestimento di protesi robotiche e arti meccanici per robot collaborativi. Dotato di una metodologia di valutazione basata sull’addestramento di una rete neurale, garantisce flessibilità al sistema.
La tecnologia garantisce elevata densità di sensori con una singola fibra ottica, superando i limiti di cablaggio dello stato dell’arte in robotica.


Tecnologia e nostra soluzione
Il sensore tattile è composto da un involucro di gomma siliconica contenente al suo interno una fibra ottica che collega, in un percorso continuo, una pluralità di sensori Fiber Bragg Grating (FBG).
L’involucro, spesso meno di 10 mm, si deforma sotto l’azione di una forza applicata sulla sua superficie, trasmettendo ai sensori FBG una corrispondente sollecitazione che viene tradotta in segnale ottico, trasportato dalla fibra ottica. Rispetto ai sensori tattili finora sviluppati, questo recettore mima per flessibilità, deformazione e sensibilità il senso umano del tatto nel percepire e localizzare la pressione su un’ampia area, anche curva, fino a 90 cm2. Il dispositivo biorobotico può essere utilizzato per rivestire protesi robotiche, anche di robot collaborativi industriali o assistivi, e collegato a reti neuronali. L’uso di sensori FBG garantisce un processo di fabbricazione facile e dal risultato ripetibile.
Vantaggi
Il sensore tattile è leggero e flessibile, permette l’adattabilità a qualsiasi tipo di superficie, andando anche a ricoprire ampie superfici curve. Una caratteristica peculiare è rappresentata dalla sensibilità percettiva, ovvero la capacità di determinare la pressione ed il punto di contatto di una forza applicata. L’utilizzo di sensori FBG semplificano il processo di fabbricazione e lo rendono ripetibile.

Roadmap
La tecnologia è stata integrata su un braccio robotico realizzato interamente dal gruppo di ricerca, ma è anche integrabile al fine di sensorizzare robot industriali commerciali.
3 mesi: dimostrazione in tempo reale della misura della forza e localizzazione del punto di contatto
6 mesi: dimostrazione di capacità multi-touch
9 mesi: integrazione e dimostrazione con braccio robotico industriale commerciale
12 mesi: tecnologia pronta per ingegnerizzazione e certificazione pre-market
TRL
Team






